Coordinate transformation from GSE to SXI
Numerical - vector approach
Spherical -> cartesian GSE -> cartesian Satellite -> FOV elevation-azimuth
- Find φ,θ from Numerical Solution & Performance for a set of
and of the Shue model - Convert it to GSE cartesian through Geocentric Solar Ecliptic System tranformation
- Convert to Satellite frame through the position and attitude files of the satellite:
The attitude is given through the definition of each base vector of the satellite in the GSE frame. We can the construct the rotation matrix from satellite to GSE:And the relation between a vector in the GSE frame and the same vector in the satellite frame is where t is the translatithon vector (position of the satellite).
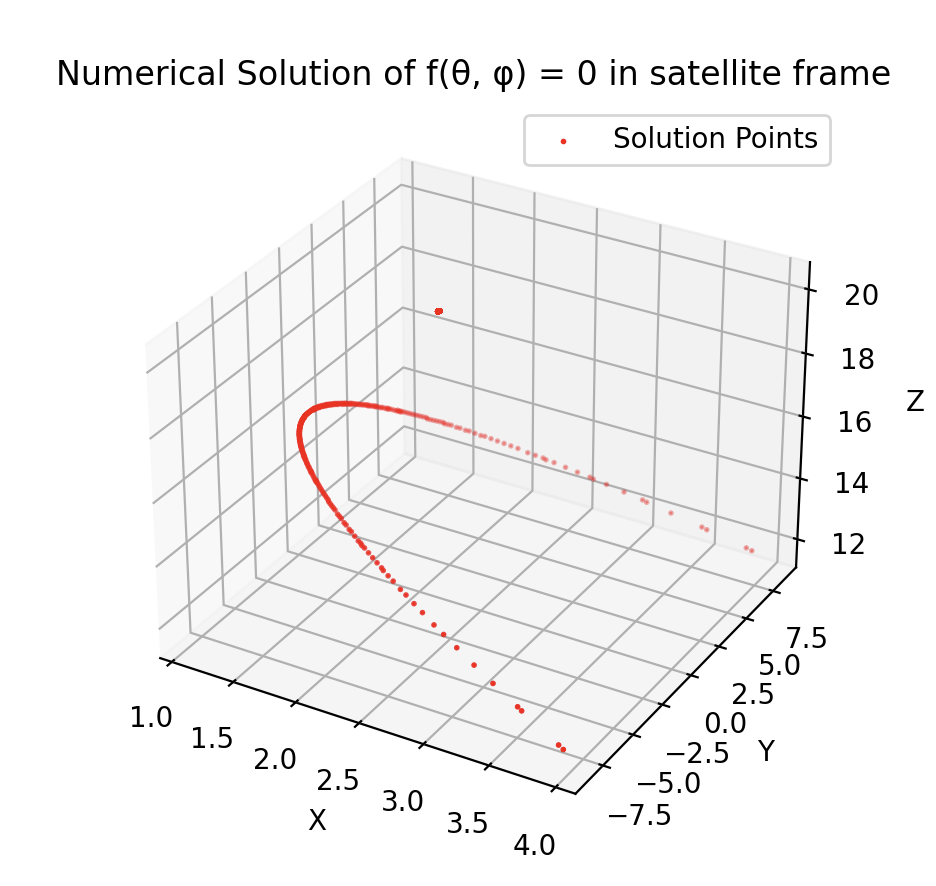
Therefore, the conversion from GSE to Satellite is defined:This returns the tangent curve in the satellite frame:
- In order to project this in the FOV coordinates we need to compute the angle of each point from the z axis (boresight) along the x and y direction of the satellite frame:
Analytical approach
Spherical to spherical coordinates
From Tangent points to SXI in GSE we have the positions of the parametric tangent curve in the GSE:
We need to convert this to elevation and angle on the SXI FOV. For this we need:
- Aim point
- Attitude and orientation of imager.
Translation of origin
If the origin of your new spherical system is shifted by (
The new polar angle (relative to the shifted origin) is:
And the azimuthal angle (after translation) is:
Euler Transformation
Now, let’s apply an Euler rotation defined by (
rotates about the x-axis (affecting ). rotates about the new y-axis rotates about the new z-axis (affecting ).
Using a direct spherical rotation without converting to Cartesian:
Convert to cartesian system of satellite
Depending on how we have defined the new axis and the corresponding rotation:
We can now take the projection in the XY plane to approximate the flat image plane and the corresponding parametric equation in this plane.